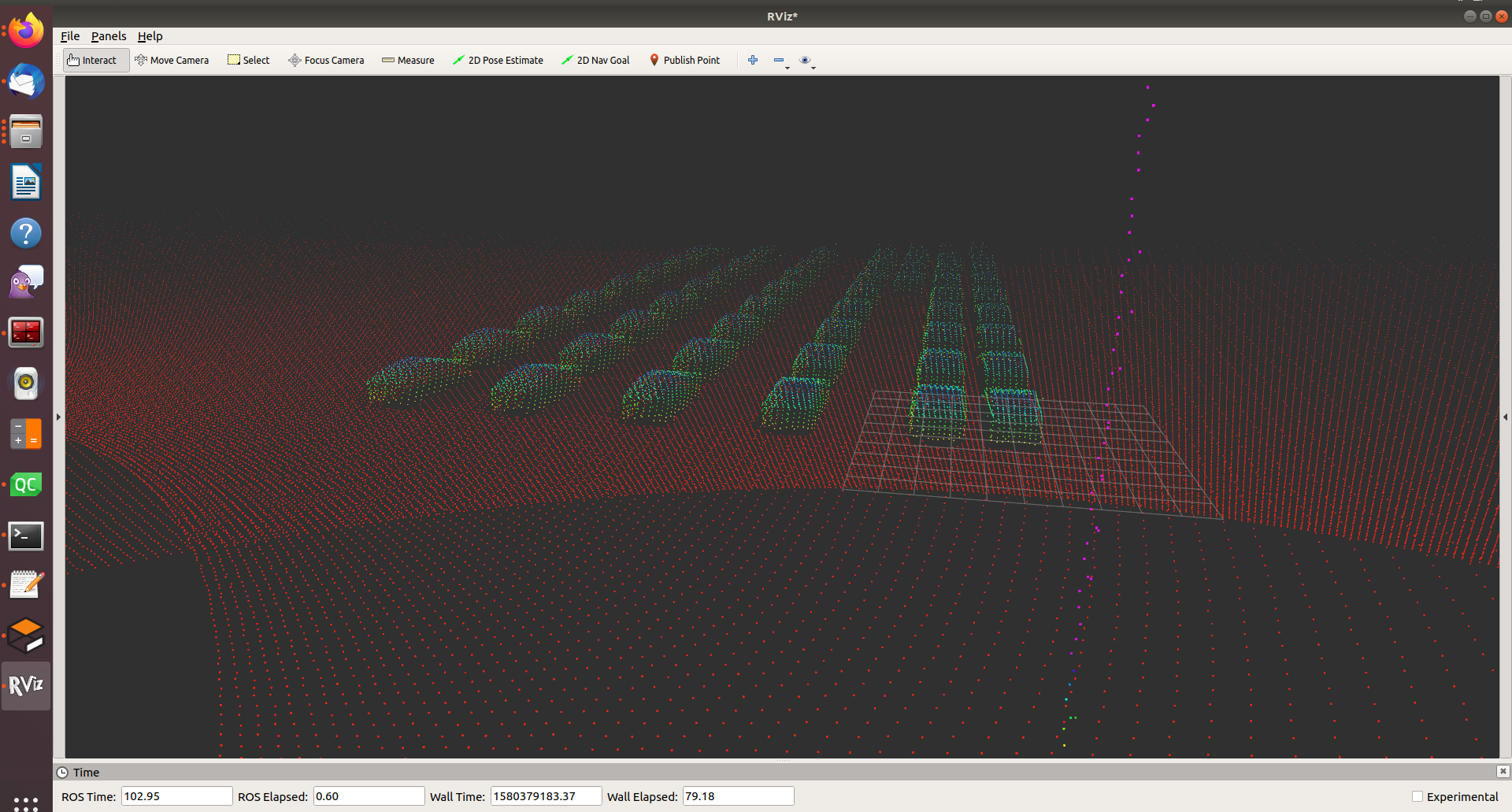
Posted on 2. December 201912. November 2021 by Sebastian HellROS: Lidar Sensor Evaluation Combined with Ackermann-Steering Vehicles Lidar Simulation of moving Vehicels Used trajectory planning ROS-Library for Ackermann-Steering vehicles teb_local_planner